CBSF-75協作機器人瞬態和準靜態力和壓力測量系統
Force and Pressure Measurement System for Collaborative Robots
協作機器人瞬態和準靜態力和壓力測量系統是用于簡化測量方法的手持式測量設備,用于檢查協作機器人上的瞬態和準靜態力和壓力。
在任何不分離防護設備的人機協作(HRC)中,都無法完全排除人機之間的碰撞。必須遵守符合ISO / TS 15066的力和壓力的允許極限值,因為它們可以確保HRC工作場所的安全運行。
測量范圍 彈簧常數 高度(mm)
CBSF-10 20 ... 300 N 10N /mm 107
CBSF-25 20 ... 500 N 25 N /mm 89
CBSF-30 20 ... 400 N 30 N /mm 75.5
CBSF-35 20 ... 500 N 35 N / mm 76
CBSF-40 20 ... 500 N 40 N / mm 73.5
CBSF-50 20 ... 500 N 50N / mm 65
CBSF-60 20 ... 500 N 60 N /mm 64
CBSF-75 20 ... 500 N 75 N / mm 62
CBSF-150 20 ... 500 N 150N / mm 60
技術參數:
測量面:80 mm?
最大測量誤差:讀數的±3%
測量誤差:典型值。讀數的±1%
上升/下降時間:≤1 ms
內部存儲器容量:100次
單次測量
電源:集成鎳氫充電電池
消耗功率:20 mA
接口:USB /無線
溫度范圍:-10…+50°C
相對濕度:20…90%r。 H。 (非凝結)
防護等級:IP 20
重量:?790克
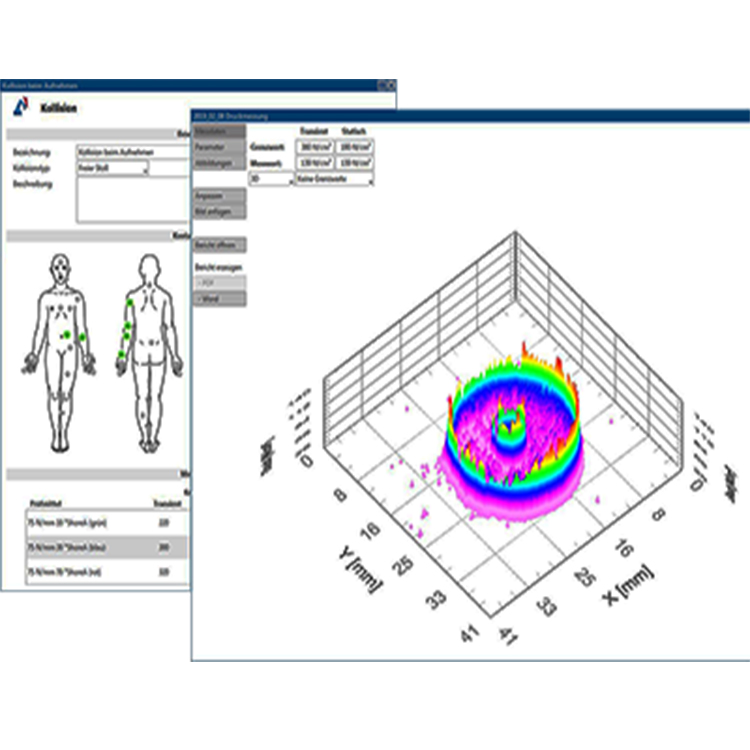
通過掃描進行壓力測量(設置CoboSafe-Scan)
測量誤差:典型值。 ±10%或更低(在23°C,65%r.h.下測量)
溫度范圍:+20…+35°C
相對濕度:35…?80%r。 H。
薄膜測距LLW:50-250 N /cm2
薄膜測距范圍LW:250-1000 N /cm2
使用薄膜傳感器進行壓力測量(Set CoboSafe-Tek)
可選提供:
-CBSF-75-夾爪作為附加力傳感器,用于夾爪的測量
-CBSF-75-Basic:帶有手柄和顯示屏的力傳感器
-安裝支架
壓力傳感器類型:9500 5051 5151 5101 5027
壓力范圍:827 N /cm2242 N /cm2242 N /cm2242 N /cm2345 N /cm2
測量表面:70 x 70毫米56 x 56毫米165 x 165毫米112 x 12毫米28 x 28毫米
傳感器:3.9 /cm262.0 /cm27.1 /cm215.5 /cm2248.0 /cm2
測量誤差:<10%<10%<10%<10%<10%
|













